作为RM战队的新人,前几天比较赶进度,忙着上手了DJI电机,就没怎么写笔记。今天终于有时间,我们则以GM6020电机作为出发点,初步讲讲CAN通信、PID单环与双环控制,今天先讲CAN。
我们之前接触过UART、SPI、I²C协议,其中UART用于一对一通信,而SPI和I²C都是一主多从。其本质上就是主机发起对话,从机回答,就像私信聊天,协调效率并不高。1980年代初,汽车电子化刚刚起步,发动机、变速箱、安全气囊、ABS等等模块都需要实时相互通信,这种“私信聊天”最终会导致一台汽车变成一个“电线森林”,极难维护。于是,汽车工程师们提出一个想法,能不能让所有模块共用一条通信线,谁有消息就在这条线上广播,别人则按需接收,此时,CAN(Controller Area Network,控制器局域网)就诞生了。由于CAN抗干扰、便宜、安全可靠,其被扩展应用到工业自动化、医疗、船舶等等领域,成为现代电子社会的一大基石。
CAN通信的知识体系非常庞杂,我们今天的目标是先通过CAN给电机发送恒定的电压指令让其转起来,只会提及那些实际使用不可绕过的核心概念。因此,这篇笔记使用一个与以往相反的方式,就是从接口调用出发来解释概念快速上手。
接线和模式
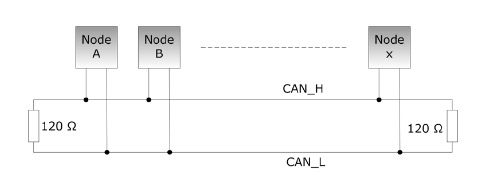
前面提到,CAN有让所有模块共用一条通信线的特点,这条通信线就是CAN总线,分为CAN_H和CAN_L,其使用差分信号通信,即CAN_H和CAN_L两根线电压一高一低作为逻辑0,相同则作为逻辑1,如果有干扰两根线也同步被干扰,相对逻辑不变,可以提升信号质量。两根总线使用两个120Ω的电阻相连接形成回路,不同设备则连接到总线上:
实践中我们连接GM6020电机只需将CAN_H和CAN_L两根线分别连接板子和电机的CAN_H和CAN_L脚即可。理论上来说STM32本身只有CAN_RX和CAN_TX脚,要连接到CAN总线中间需要CAN收发器芯片,将单片机能识别的高低电平转换成差分信号。 (学长设计的板子已经集成好了)
CAN通信有四种模式,常规模式、静默模式、回环模式、静默回环模式,静默为向总线只收不发,回环是向总线只发不收,静默回环则是彻底与总线隔离,自收自发,要与电机通信,常规模式即可。
时钟配置
CAN通信中一个比特位的数据传输的时间固定,这一小段时间被分为同步段、传播段、相位缓冲段1、相位缓冲段2四个部分。这里一个时钟周期/Prescaler的时间段称为一个TQ(Time Quanta, 时间量子)。
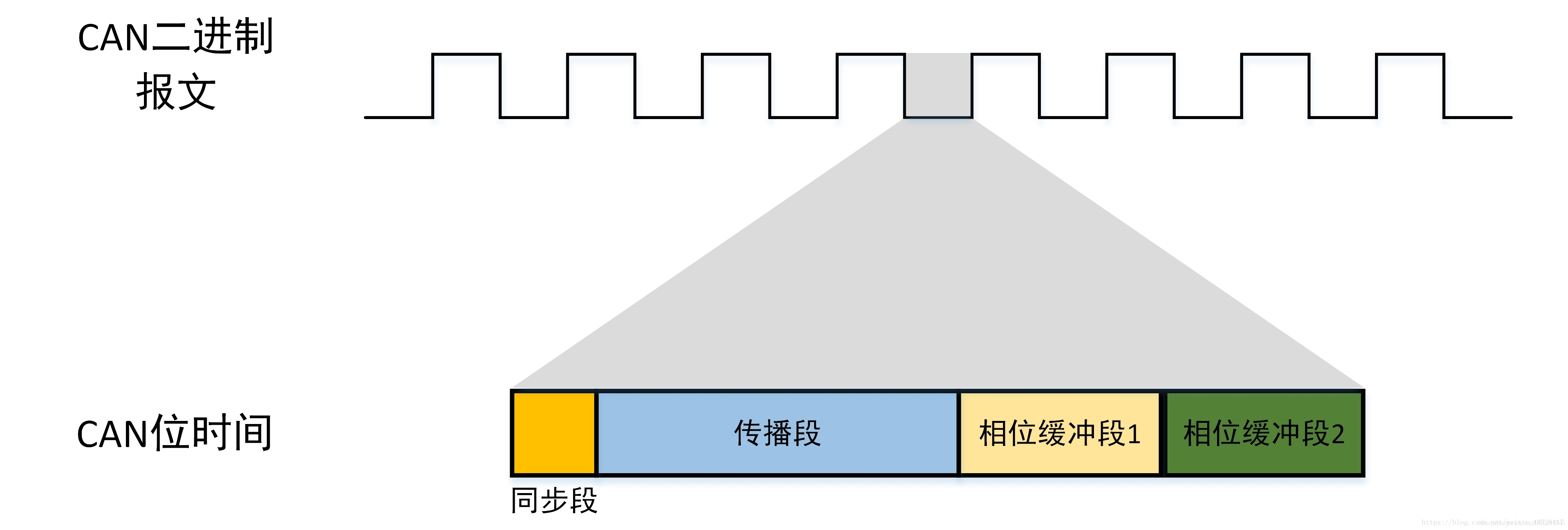
其中,同步段用于通信对齐,时间恒占一个TQ;传播段用于消耗信号物理传输的时间;两个相位缓冲段用于等待信号稳定,相当于容错缓冲;而夹在两个相位缓冲段之间的便是时间采样点,这个时间点就用于观测这个比特位是1还是0。传播段与相位缓冲段1合称为BS1(Bit Segment 1,比特段1),相位缓冲段2称为BS2(Bit Segment 2,比特段2),BS1和BS2所占的TQ数量可以在STM32CubeMX中调整,因此一个比特位的完整时间就是(1+BS1+BS2)*TQ,而波特率就是每秒能传输多少个比特位,即1/((1+BS1+BS2)*TQ),单位是bps,和Hz同量纲(1/s)。
例如,时钟频率是42MHz,GM6020需要的波特率是1Mbps。我们依然把波特率=1/((1+BS1+BS2)*TQ)和TQ=时钟周期/Prescaler全部转换成频率来表示,则有:
波特率=时钟频率/((1+BS1+BS2)*Prescaler)
不妨设Prescaler为3,那么1+BS1+BS2=时钟频率/(Prescaler*波特率)=42MHz/(3*1Mbps)=14。在分配BS1和BS2的值时,我们建议将前者分配大一点,目的在于将时间采样点偏后移来保证信号更稳定。这里我们可以分配BS1=9,BS2=4,即可满足条件。
另外还有两点,其一是分配一个比特位时间(1+BS1+BS2)*TQ时,不能太短,否则信号来不及传输或稳定,STM32CubeMX会报错。其二时注意单片机的外部晶振,我们学校的STM32F405RGT6板子只支持8MHz的外部输入频率,这个问题困扰了很久才发现。
发送与接收
发送数据
| |
这个函数是一个给GM6020电机发送电压的最简实现。显而易见,一个8字节的数组报文TxData的索引2和索引3的位置分别被赋值了vol的高八位和低八位。根据GM6020的说明书,一条指令最多能控制4个电机,索引2和索引3则是ID为2的电机,电机ID(1-4)在底部开关处可调整。
CAN_TxHeaderTypeDef结构体则用于处理一些CAN通信的基本设置,称为帧头,DLC(Data Length Code,数据长度代码)用于指定报文的字节数,这里显然是8字节;IDE(Identifier Extension,标识符扩展位)用于指定数据帧类型,其分为标准帧和扩展帧,二者报文长度和格式均不同,GM6020使用标准帧,因此为CAN_ID_STD;RTR(Remote Transmission Request,远程传输请求),其分为数据帧和远程帧,数据帧是直接向对方发送数据,远程帧是要求对方发送数据,这里显然选择数据帧CAN_RTR_DATA;StdId则是指定对应的标准帧CAN ID,这是设备的唯一识别码,GM6020的说明书中规定使用电压控制为0x1FF。需要注意的是,标准帧的CAN ID最多为11位,因此范围是0-0x7FF。
接下来是CAN的邮箱机制。为了防止数据冲突丢帧,CAN设计了三个发送邮箱,数据不会直接推上总线,而是以邮箱作为载体发送,分为CAN_TX_MAILBOX0、CAN_TX_MAILBOX1、CAN_TX_MAILBOX2。这里选择第一个作为优先邮箱,如果第一个邮箱正在被占用,则会自动选择其他邮箱等待发送。最后HAL_CAN_AddTxMessage()函数则是正式的发送接口,传入所有上述参数,不多赘述。
接收数据
滤波器
| |
单片机暴露在CAN总线上,理论上可以接受总线上的所有报文,但我们一般只希望看到我们需要的报文,这时滤波器就起到作用了。和发送时配置帧头类似,滤波器使用CAN_FilterTypeDef结构体进行配置。
首先是FIFO(First In First Out,先入先出队列),其与发送端的邮箱机制类似,也是一种队列处理机制。CAN提供了两个FIFO,分别为FIFO0和FIFO1,每个FIFO可以存储3条报文,按顺序接收,超过3条可能会被丢弃。这里的FilterFIFOAssignment就是选择对接滤波器的FIFO,这里选择CAN_FILTER_FIFO0。
然后从几个简单的入手,FilterBank指的是滤波器的编号,我使用的STM32F405RGT6共有14个滤波器(0-13),分别可以分配给CAN1和CAN2,上面选择第一个滤波器,即为0;SlaveStartFilterBank指从第几个滤波器开始分配给CAN2,上面的代码根本没有启用CAN2,因此可以直接设置为0;FilterActivation指的是是否启用该滤波器,CAN_FILTER_ENABLE即为启用;FilterMode指的是滤波器模式,分为CAN_FILTERMODE_IDLIST(列表模式)和CAN_FILTERMODE_IDMASK(掩码模式),列表模式是只有当所有位明确匹配滤波器ID时才通过,而掩码模式是指定特定几位匹配滤波器ID就可以通过,后者显然更灵活也更常用。
我们先来看看掩码模式中是怎么实现“匹配ID的特定几位”的。这是掩码模式匹配通过的充要条件:
(接收到的ID & 掩码) == (滤波器ID & 掩码)
这个公式中,我们看到一个新的运算&,称为按位与。其定义是:两个长度相同的二进制数,两个相应的位都为1,该位的结果值才为1,否则为0。例如:
| |
我们可以发现,这个运算达到了一个巧妙的效果,0101任何一位旦碰到1,就能保留原值,一旦碰到0就变成0,换句话说,这些碰到0的位被遮掩了。0011的作用就是相当于告诉0101,我只想知道你的后两位是几,前两位并不关心,这时,0011就起到了一个筛选的作用,我们将其称为掩码。
再回到之前那个公式,接收到的ID & 掩码就相当于接收到的ID筛选过的特定几位,那么滤波器ID & 掩码就相当于滤波器ID筛选过的特定几位,翻译成人话,就是我想让你的ID里面特定几位和我的相同,我就让你进FIFO。
了解了掩码的原理,我们就可以分析上述的“ID”本身了。这里的ID并不是前面提到的CAN ID,而是完整的32位寄存器ID,标准帧的寄存器ID构成是这样的:
| 31 ~ 21位 | 第20位 | 第19位 | 18 ~ 0位 |
|---|---|---|---|
| CAN ID | IDE | RTR | 保留为 0 |
滤波器在匹配寄存器ID中,把一个ID一劈分成两半,即高16位和低16位,在标准帧的情况下低16位都是0,因此我们只需关心高16位:
| 16 ~ 6位 | 第5位 | 第4位 | 3 ~ 0位 |
|---|---|---|---|
| CAN ID | IDE | RTR | 保留为 0 |
比如我们要匹配CAN ID为0x1FF,首先要给出掩码,我们只关心CAN ID,不关心IDE和RTR,因此应该是一个6-16位都是1,0-5位都是0的二进制数。我们可以将11位全10x7FF抬高5位,正好就可以放在高16位的6-16位的位置,即0x7FF << 5 = 0xFFE0。接下来给出滤波器ID,同理,我们依然只需给出CAN ID位置上的匹配目标,即0x1FF,将其抬高5位即可,0x1FF << 5 = 0x3FE0。处理完这些,还有最后一步,就是需要保证给出的两个高16位ID都真的只有16位,不能多位或少位,这里有一个技巧,就是将其与16位全10xFFFF进行按位与,这个操作不会改变有效16位中的任何值,但可以截断其他位。这样一来,我们就有了FilterMaskIdHigh = (0x7FF << 5) & 0xFFFF和FilterIdHigh = (0x1FF << 5) & 0xFFFF。
前面提到,低16位全部保留为0,因此FilterMaskIdLow和FilterIdLow全部赋为0即可。读者在这里可能有疑惑,都是0还设置这样两个变量有什么用。其实很简单,因为上面所述的所有ID格式都是标准帧格式,扩展帧格式则不同,这里不做展开,但有一些有效量会放在低16位。就标准帧情况下,我们不难看出,ID低16位的匹配机制被浪费了,因此CAN便提供了第二种匹配机制,即CAN_FILTERSCALE_16BIT,可以赋给FilterScale启用。这种16位匹配机制会将FilterMaskIdLow和FilterIdLow用于映射匹配第二个ID的高16位,换句话说,就是一个滤波器可以用于匹配两个ID,效率更高。缺点是,当标准帧和扩展帧同时出现,很有可能误匹配,与其相反CAN_FILTERSCALE_32BIT则是32位每一位都精确匹配,就是以上所述的默认情况。
全部配置完成后,调用最终的HAL_CAN_ConfigFilter()传入结构体,即可大功告成。
接收
| |
上面的代码就很简单了,实现了从GM6020读取角度和速度值。HAL_CAN_RxFifo0MsgPendingCallback()时FIFO0的接收回调,HAL_CAN_GetRxMessage()则拿回对方发送的帧头结构体和数据内容。根据GM6020的说明书,角度放在索引0和索引1的位置,范围是0-8191绝对刻度(即2^13,13位二进制数),将其与0x1FFF按位与目的也在于截出13位有效值;速度放在索引2和索引3的位置,单位是RPM,有正负,需要注意的是将uint16_t与int16_t强制转型。|是按位或运算,与按位与相反,是同位只要有一个为1,结果就为1,其可以用于高低位拼接。
最后的最后
要成功传出数据,还有一个要注意的点是函数调用的顺序,在main.c中,按照我上面定义的几个函数,应该是这样调用的:
| |
这样便可以实现每隔50ms向电机发送8000电压数据开转了。需要注意就是Configure_Filter()要在HAL_CAN_Start(&hcan1)之前调用。